Commits on Source (61)
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Florence Zara authored
-
Florence Zara authored
-
Florence Zara authored
-
 PRONOST NICOLAS authored
PRONOST NICOLAS authored -
PRONOST NICOLAS authored
-
PRONOST NICOLAS authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
ZARA FLORENCE authored
-
ZARA FLORENCE authored
-
ZARA FLORENCE authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
- /web/content/personnage/tp_motiongraph.md - /web/content/personnage/tp.md
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
- /web/content/personnage/charanim_ball.png - /web/content/personnage/charanim_interpolation.png - /web/content/personnage/fsm.png - /web/static/doc_charanim/charanim_ball.png - /web/static/doc_charanim/charanim_interpolation.png - /web/static/doc_charanim/fsm.png - /web/content/personnage/tp.md
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
- /web/content/personnage/code.md - /web/content/personnage/_index.md
-
Alexandre MEYER authored
-
Alexandre MEYER authored
- /web/content/personnage/tp.md - /web/content/personnage/code.md
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
-
Alexandre MEYER authored
- /web/content/personnage/tp.md - /web/content/personnage/_index.md
-
Alexandre MEYER authored
-
ZARA FLORENCE authored
-
ZARA FLORENCE authored
-
ZARA FLORENCE authored
-
ZARA FLORENCE authored
-
ZARA FLORENCE authored
-
ZARA FLORENCE authored



Showing
- NP_controle.md 0 additions, 14 deletionsNP_controle.md
- README.md 25 additions, 37 deletionsREADME.md
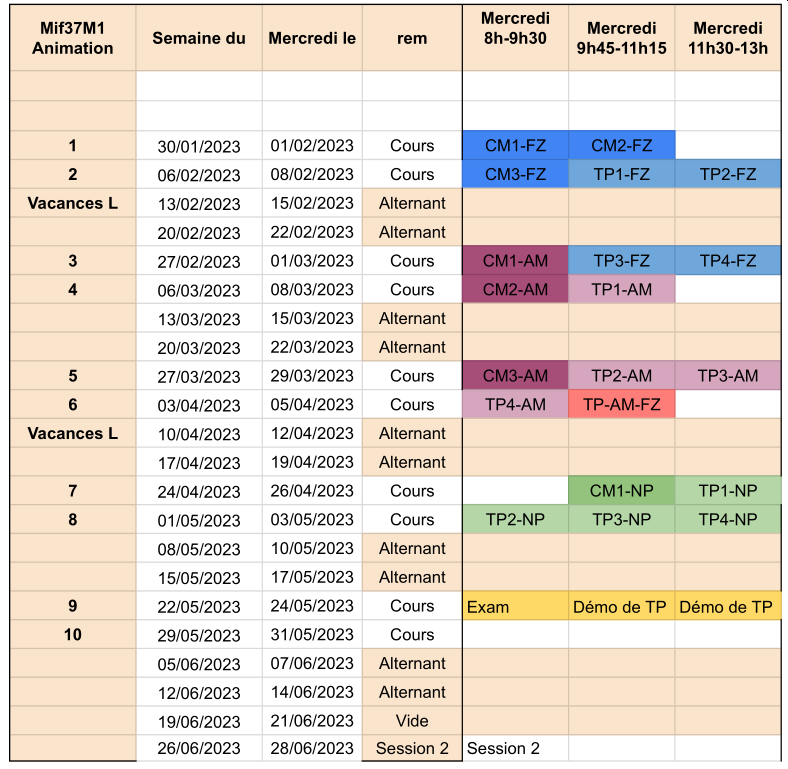
- documents/M1if37_edt.pdf 0 additions, 0 deletionsdocuments/M1if37_edt.pdf
- documents/M1if37_edt.png 0 additions, 0 deletionsdocuments/M1if37_edt.png
- images/M1if37.png 0 additions, 0 deletionsimages/M1if37.png
- images/im1.png 0 additions, 0 deletionsimages/im1.png
- images/im2.png 0 additions, 0 deletionsimages/im2.png
- web/archetypes/default.md 1 addition, 1 deletionweb/archetypes/default.md
- web/config.toml 43 additions, 14 deletionsweb/config.toml
- web/config.yaml 0 additions, 137 deletionsweb/config.yaml
- web/content/_index.md 59 additions, 0 deletionsweb/content/_index.md
- web/content/about/_index.md 0 additions, 1 deletionweb/content/about/_index.md
- web/content/about/about.md 0 additions, 1 deletionweb/content/about/about.md
- web/content/controle/_index.md 0 additions, 14 deletionsweb/content/controle/_index.md
- web/content/controle/index.md 14 additions, 0 deletionsweb/content/controle/index.md
- web/content/home/_index.md 0 additions, 54 deletionsweb/content/home/_index.md
- web/content/personnage/_index.md 54 additions, 0 deletionsweb/content/personnage/_index.md
- web/content/personnage/code.md 74 additions, 0 deletionsweb/content/personnage/code.md
- web/content/personnage/tp.md 185 additions, 0 deletionsweb/content/personnage/tp.md
- web/content/personnage/tp_motiongraph.md 83 additions, 0 deletionsweb/content/personnage/tp_motiongraph.md
NP_controle.md
deleted
100644 → 0
documents/M1if37_edt.pdf
deleted
100644 → 0
File deleted
documents/M1if37_edt.png
deleted
100644 → 0
{kind=link}
166 KiB
images/M1if37.png
deleted
100644 → 0
{kind=link}

21.4 KiB
images/im1.png
deleted
100644 → 0
{kind=link}

212 KiB
images/im2.png
deleted
100644 → 0
{kind=link}

67.2 KiB
web/config.yaml
deleted
100644 → 0
web/content/_index.md
0 → 100644
web/content/about/_index.md
deleted
100644 → 0
web/content/about/about.md
deleted
100644 → 0
web/content/controle/_index.md
deleted
100644 → 0
web/content/controle/index.md
0 → 100644
web/content/home/_index.md
deleted
100644 → 0
web/content/personnage/_index.md
0 → 100644
web/content/personnage/code.md
0 → 100644
web/content/personnage/tp.md
0 → 100644
web/content/personnage/tp_motiongraph.md
0 → 100644